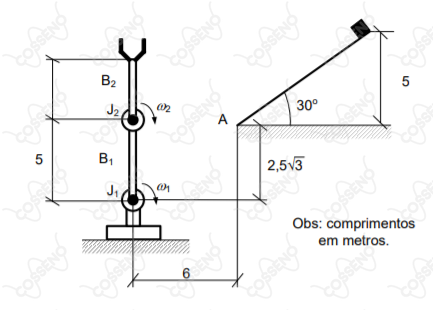
A figura acima mostra um braço robótico, com duas juntas e e dois braços e , que é usado para pegar um bloco que é liberado do alto de uma rampa sem atrito, a partir do repouso.
No instante em que o bloco é liberado, a junta é acionada com velocidade angular constante e a junta é acionada com velocidade angular .
Diante do exposto:
a) determine o comprimento do braço para que a garra do manipulador alcance o bloco no exato instante em que ele atinge o ponto ;
b) determine a velocidade angular , em , em que a junta deverá ser acionada para que a garra do manipulador chegue no ponto no mesmo instante do bloco; e
c) faça um esboço da configuração final do manipulador, mostrando todas as cotas, no momento em que a garra do manipulador pega o bloco.